Ultimi post
-

Piattaforme di Social VR 4 Marzo 2020
-

I mondi virtuali a Venice Immersive 2024 – Parte 4 29 Agosto 2024
-

I mondi virtuali a Venice Immersive 2024 – Parte 3 28 Agosto 2024
-

I mondi virtuali a Venice Immersive 2024 – Parte 2 27 Agosto 2024
-

Linea di stitching #57 – Federico Anselmi 26 Agosto 2024
-

I mondi virtuali a Venice Immersive 2024 – Parte 1 26 Agosto 2024
Meshroom: la nuvola di punti sparsa e densa
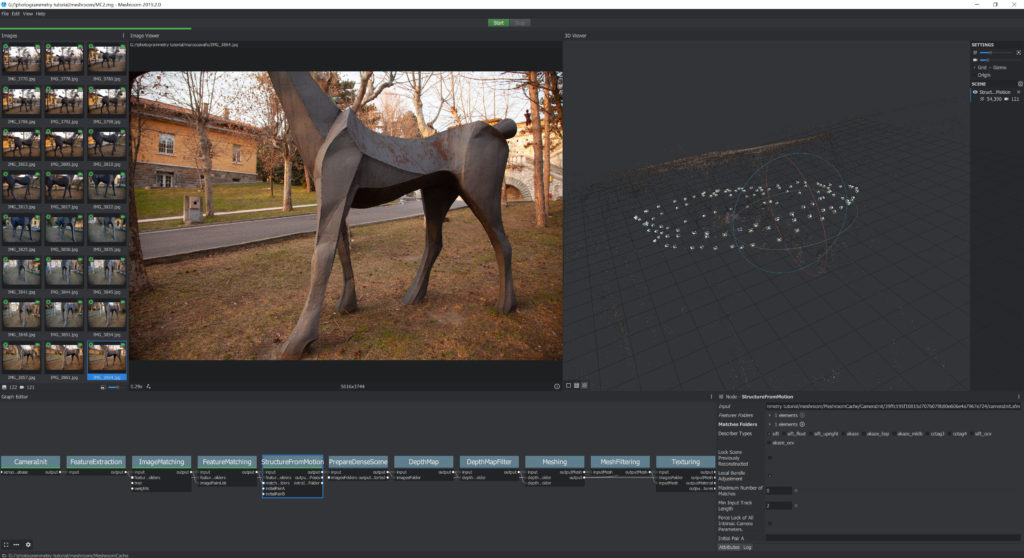
Il nodo StructureFromMotion è dove inizia la magia e di fatto è la fase in cui l’algoritmo individua la relazione geometrica tra le varie immagini creando una nuvola di punti sparsa (Sparse Point Cloud) e ricostruisce la posizione dello scatto in relazione all’oggetto.
Appena conclusa la fase StructureFromMotion nel pannello 3DViewer comparirà la nuvola di punti che mostrerà i punti rilevati dall’algoritmo e il posizionamento degli scatti nello spazio 3D.
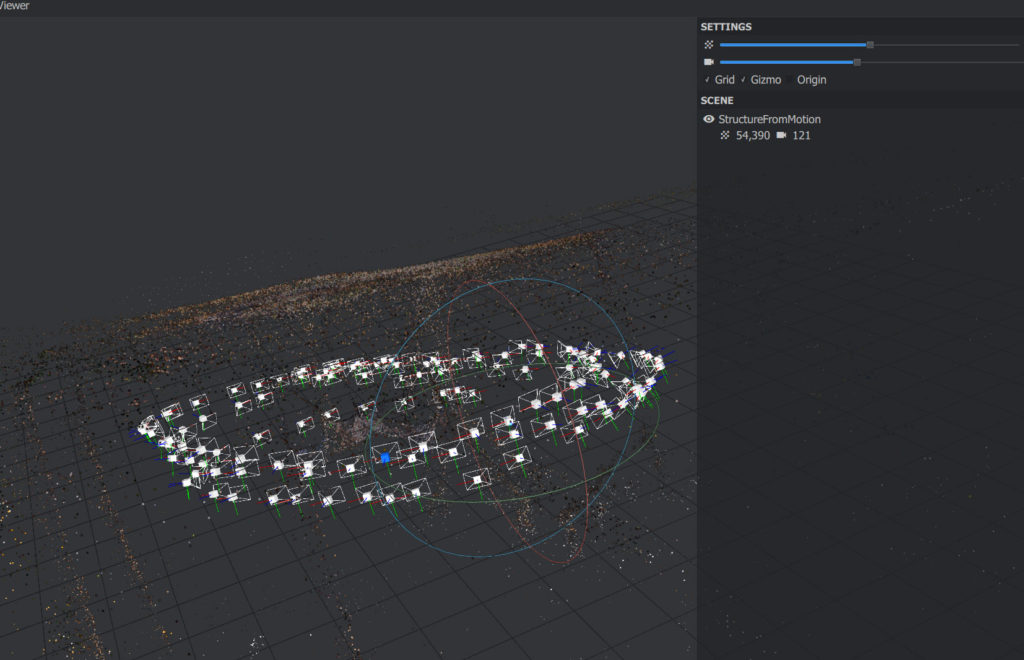
Nel pannello 3DViewer si attiveranno anche alcune voci nella finestra Settings che indicano rispettivamente la dimensione dei punti, la dimensione delle icone che indicano la posizione dello scatto, la possibilità di attivare/disattivare la griglia di riferimento, la possibilità di attivare/disattivare il Gizmo e la possibilità di attivare/disattivare il punto di Origine della mesh.
Nella sezione Scene vediamo il numero di punti rilevati nella nuvola e il numero di immagini utilizzate per crearla.
Prima di passare alla fase successiva vediamo come muoverci all’interno del pannello 3DViewer. Il tasto sinistro del mouse ci permette di ruotare la view, premendo il tasto o rotellina centrale ci potremo spostare sull’asse x e y ovvero orizzontalmente e verticalmente. Se clicchiamo due volte in un punto della finestra 3DViewer si sposta il punto di origine o pivot point attorno al quale ruotiamo la view. Con la rotellina del mouse attiviamo lo zoom. Se ci perdiamo nella view clicchiamo il tasto destro e selezioniamo Fit All e la nuvola di punti verrà visualizzata nella sua totalità nella finestra, se selezioniamo Reset View si tornerà alla visualizzazione iniziale.
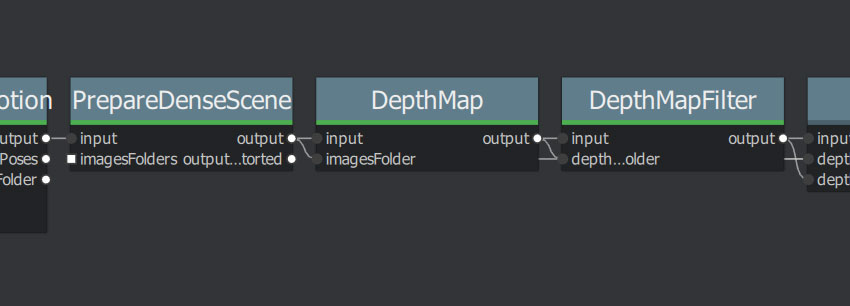
La fase successiva è la fase di creazione della nuvola di punti densa ed è la fase che richiede più risorse al nostro PC.
Questa fase comprende i tre nodi, PrepareDenseScene, DepthMap e DepthMapFilter, che operano sui dati rilevati dal nodo StructureFromMotion per estrapolare i dati di depth map.
Creata la depth map possiamo passare alla fase successiva nella prossima lezione.